相控阵天线测试校准方法简介
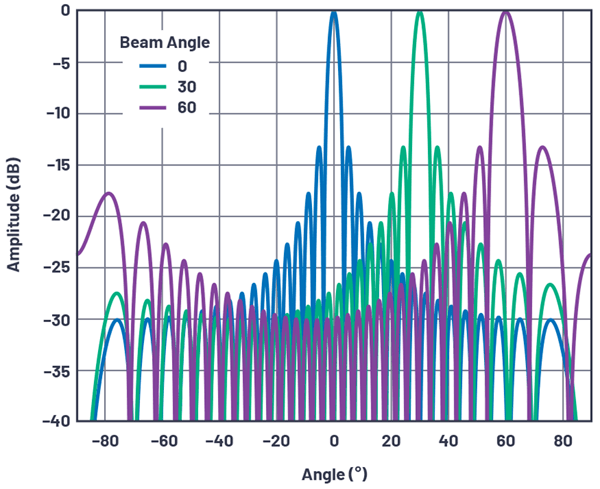
相控阵天线通过改变各天线通道馈电的相位和幅度,达到波束扫描的目的,因此可以实现探测,搜索、识别、跟踪和制导等目的。然而天线设计完成后由于各种误差,许多重要指标会受到各天线通道相位和幅度的不一致性影响,需要将每个单元的初始幅相校准到同一水平才能实现更佳的性能。因此相控阵校准技术成为相控阵测试的热点问题,随着对相控阵天线性能要求的不断提高,相控阵校准技术也在不断发展。
主要的校准方法有近场扫描测量法、中场校准方法、旋转矢量法(REV)、线性矩阵求逆法、互耦校准法、正交编码校准法、换相法等。
近场扫描测量
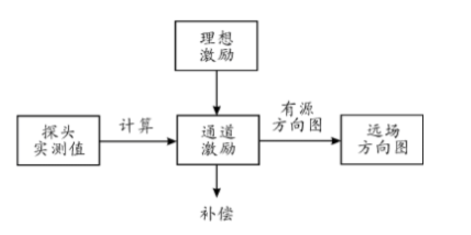
近场扫描校准是相控阵最常用校准方法之一,通过探头对围绕阵列闭合面上的电场采样,经过数值计算获得单元的幅相特征和有源方向图,再计算远场方向图。近场探头一般距离相控阵天线3~5波长。
中场校准
中场校准技术利用参考天线放在待测相控阵前方特定的位置上,对相控阵进行测试,通过对所测到的耦合幅相值进行一系列的修正,利用这些修正后的幅相值对天线单元进行配幅配相,以实现相控阵的正常工作
旋转电矢量法校准 (REV)
该方法适用于阵列每个单元馈电相位均可360°调控的场合,过程为固定阵列其他单元馈电不变,按照一定的步进对待校准单元进行相位的0°~ 360°旋转(最大步进值90°),并在远场测量旋转过程中测量探头的幅度变化,遍历每个单元,最终通过曲线拟合等后处理方式解算出单元之间的幅相误差。
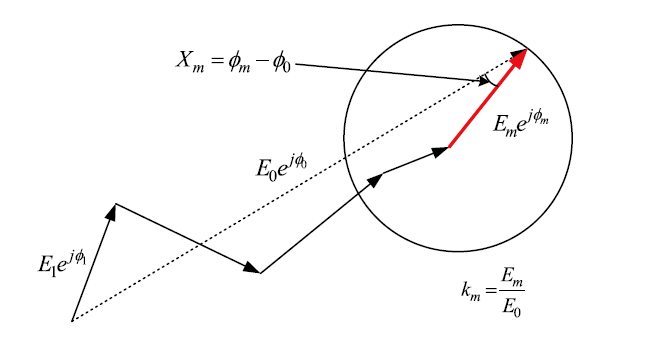

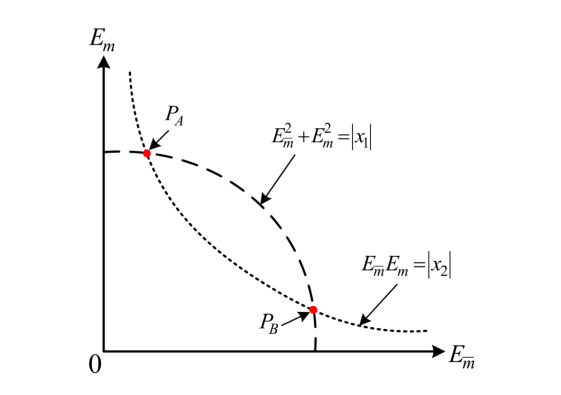
通过改进的旋转矢量法,只需要将每个单元的相移值减少到只需要遍历0°、90°、180°三种状态,通过求解关于Em和Em的方程组得到每个单元初始幅相,从而提高校准效率。
线性矩阵求逆法
对于无源阵列天线的通道一致性测量,如果比较容易获得测量信号的相位信息,适宜采用线性矩阵法,以降低测量状态数及开关切换次数,并且对于移相器位数要求低。该系统基于单探头校准模式,探头处于接收或者发射状态,分别配置预先设定好的M组相位配置状态,采集链路信号幅相,形成激励相位配置矩阵和系统响应向量,最终通过解算线性矩阵求得被测量阵列的通道幅相一致性。矩阵可以选择条件数为1的Hadamard矩阵A生成任意阶数的系数矩阵。
远场通/断校准方法
该方法可实现在远场区对阵列天线通道幅相一致性进行自动化测量和校准,校准探头系统仅由单个天线构成,校准系统仅需控制DUT通道的通断,通过N次数据采集,即可由反演算法反演出通道数为N的DUT单元幅相误差。

互耦校准法
互耦技术 (MCT)和互耦校准方法(MCCM)作为外部校准的一种替代方法,可以实现阵列的内部在线校准,因此被认为是未来相控阵系统中校准的理想选择。但是该方法要求阵列具有发射通道,并且其他单元能够同时处于接收状态,且需要保证单元之间互耦状态的一致性和足够的先验知识来辅助校准。
正交编码校准法
正交编码校准算法利用大于阵列单元数量的时分复用正交编码信号在接收端进行相干运算并解码,使得校准时间大大缩短,较单天线校准方法缩减了N (阵
列单元数)倍。利用控制电路正交编码技术,实现可在远场或近场条件下使用校准探头对阵列单元进行校准,利用相干接收器和解码器对单元相位进行了恢复。
换相校准法
换相校准方法通过对单元相位的切换及信号的变化规律的测量,最终实现单元通道相位幅相差异的解算,可同时实现相控阵雷达的单元及系统级别的校准。